「平成23年度 LEDパネルでのUAV飛行支援システム 補助事業」
http://ringring-keirin.jp

| ※この研究は,競輪の補助を受けて実施しました. 「平成23年度 LEDパネルでのUAV飛行支援システム 補助事業」 http://ringring-keirin.jp |
|
無線操縦ヘリコプタ等のUAV(無人航空機)は,航空写真(測量,機動観測),農薬散布,災害救助等,様々な目的で使用されている.しかし,広範囲での飛行においては,目視による操縦は熟練者でも難しい.特にUAVが遠方に飛んだ場合,無線操縦の電波が届かなくなり,操縦不能に陥いることもある.
本研究では,このような状況下であっても,UAVが自律的かつ安全に飛行できるようにするため,LEDパネルを用いた無線操縦ヘリコプタの操縦支援システムの開発を目的とする.具体的には,機体にカメラを搭載し,地上に設置したLEDパネルに表示されるパターンを撮影・解析することで,ヘリの飛行制御を行えるシステムの構築を目指すものである.
本研究では,これまでに,ヘリに搭載したカメラにて,上空からLEDパネルを撮影し,その画像から情報を読み取る手法について検討している.
この研究においては,独自のLEDパネルの設計・製作を行い,所望のパターンを自由に表示できるよう,マイコンによる制御装置とソフトウェアを開発し,次に,画像から,ARマーカやQRコードの検出・識別を行う方法を検討した.
そして,実際に,上空からヘリでLEDパネルを撮影し,パターン識別等を行う実験を実施し,識別率70%以上,高度計測精度±0.44mの結果が得られた.実用化するためには,識別率等をより向上させる必要があるが,これにより,LEDパネルにてヘリに指示を出し,自律飛行制御を行うことが可能であると考えている.
本研究の内容を元に,無線操縦ヘリコプタの自動飛行制御が実現すれば,特定の位置での離発着や,決められた航路を自動的に巡回することが可能になる.これにより,例えば,牧場の見回りや田畑の作物の成育状況の観測,街中の上空からのパトロールが可能となる.特に,災害時には,現場の状況をいち早く確認することが必要であり,そのような場面において,本研究の内容は非常に役立つものと考えられる.また,屋内であれば,飛行船を用いることで,工場内での荷物の運搬,巨大な倉庫内で高所にある在庫の確認等を,安全かつ静粛に行うことができることから,本事業での実施内容は,様々な応用への展開が可能であると言える.
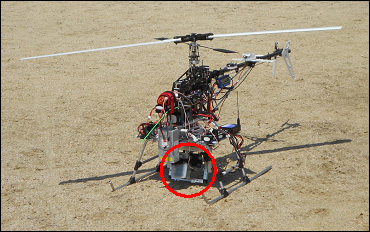
一般的な無線操縦ヘリコプタにズームカメラを搭載し,上空からLEDパネルを撮影できるようにしたものである.撮影した映像は,ヘリに搭載している無線映像送信機によって,リアルタイムに,地上のパソコンに送ることができる.カメラは,図中の赤丸に示す,サーボモータによって動くジンバル機構に取り付けており,ヘリの傾きを加速度センサで検出することによって,ヘリが傾いても常にカメラを下向きにできる.
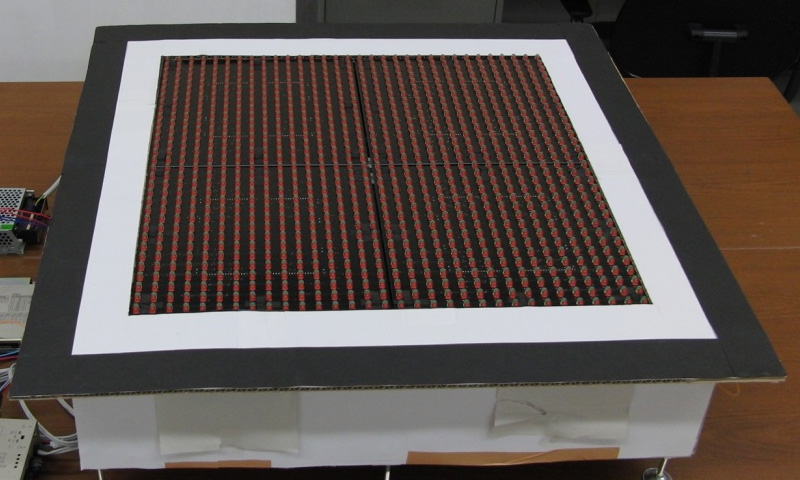
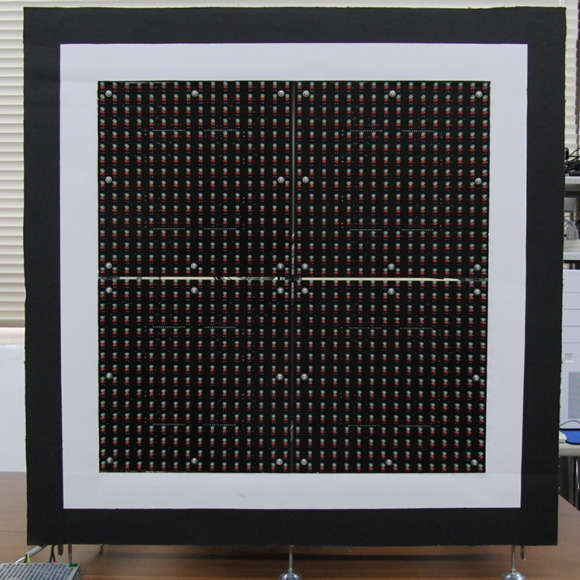
パネル部分は,一辺が480mmであり,32×32個のLEDで構成されている.また,LED部周辺の白と黒の枠はパネル自身を画像から検出するためのものである.本研究では,このようなパネルを2台製作した.また,フレーム部分の部品を取り換えることによって,右図のように縦型にでき,ヘリを使わずに,室内でも実験ができるようにしている.
 |
 |